




回流式可視化水槽
本研究所が独自に開発した総合的な可視化能力を備えた回流水槽で、 非常に低速な流れが実現できます。 この水槽を使って昆虫が飛翔している時の翅周りの流れを模擬できるだけでなく、 その流れの様子を詳しく知ることができます。

|
|
||
| 回流式可視化水槽 | 流れの可視化 |


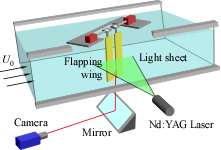
3次元PIV(粒子画像流速測定法)システム
3次元PIVシステム(Lavision社FlowMaster PIVシステム)では、 昆虫の羽ばたき運動による複雑な3次元的な流れを可視化し、そのメカニズムを明らかにします。
|

|
| 3次元PIVシステム | マルハナバチの羽ばたき翼のスケールモデル装置 |
3カメラ3次元運動解析システム
「3カメラ3次元運動解析システム」とは、 3台の高速度カメラ(Photron社FASTCAM-1024PCI)でトンボの飛行を撮影し、 その画像を3次元運動解析ソフトウエア(DITECT社DippMotionXD)に入力して、 トンボの翅のフラッピング角やフェザリング角などのデータを取得するシステムです。

|

|
| 3カメラ3次元運動解析システム | トンボの離陸飛行 |
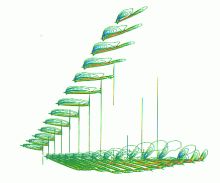
数値シミュレーションシステム
複雑な羽ばたき運動による翼まわりの流れを数値シミュレーションによって解析します。 数値シミュレーションシステム(PCクラスタ)では、40個のCPUが搭載されていて、 羽ばたき運動の最適計算や、翼が変形する流体/構造連成解析を高速に計算することができます。

|
|
| PCクラスタ | CFDによるトンボの羽ばたき流れ |